
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
西门子6SL3130-7TE28-0AA3
自动程序如图10-14所示,系统工作为单步方式时,X2为ON,其动断触点断开,辅助继电器一般情况下M2 为OFF 。X3、X4都为OFF,“单周期"和“连续"工作方式被禁止。假设系统处于初始状态,M10为ON,当按下起动按钮X6时,M2变为ON,使M11为ON,Y0线圈得电,机械手下降。放开起动按钮后,M2立即变为OFF。当机械手下降到下限位时,与Y0线圈串联的X16动断触点断开,Y0线圈失电,机械手停止下降。此时,M11、X16均为ON,其动合触点接通,再按下起动按钮X6时,M2又变为ON,M12得电并自保持,机械手进入夹紧状态,同时M11也变为OFF。在完成某一步的动作后,必须按一次起动按钮,系统才能进入下一步。

如果选择的是单周期工作方式,此时X3为ON,X2的动断触点接通,M2为ON,允许转换。在初始步时按下起动按钮X6,在M11电路中,因M10、X6、M2的动合触点和M12的动断触点都接通,所以M11变为ON,Y0也变为ON,机械手下降。当机械手碰到下限位开关X16时停止下降,M12变为ON,Y4也变为ON,机械手进入夹紧状态,经过1.7s后,机械手夹紧工件开始上升。这样,系统就会按工序一步一步向前运行。当机械手在M18步返回原位时,X4为OFF,其动合触点断开,此时不是连续工作方式,因此机械手不会连续运行。
系统处于连续方式时, X4为ON ,它的动合触点闭合,在初始步时按下起动按钮X6,M1得电自保持,选择连续工作方式,其它工作过程与单周期方式相同。按下停止按钮X7后,M1变为OFF,但系统不会立即停下,在完成当前的工作周期后,机械手最终停在原位。
2.3.2 基本指令配合步进指令的编程方法

运用步进指令编写机械手顺序控制的程序比用基本指令更容易、更直观。在机械手的控制系统中,手动和回原位工作方式用基本指令很容易实现,这里不重复。只介绍图10-15所示的顺序功能图,该图实现了机械手的自动连续运行。图中特殊辅助继电器M8002仅在运行开始时接通。S0为初始状态,对应回原位的程序。在选定连续工作方式后,X4为ON,按下回原位按钮X5,能保证机械手的初始状态在原位。当机械手在原位时,夹钳松开Y4为OFF,上限位X17、左限位X21都为ON,这时按下起动按钮X6,状态由S0转换到S20,Y0线圈得电,机械手下降。当机械手碰到下限位开关X16时,X16变为ON,状态由S20转换为S21,Y0线圈失电,机械手停止下降,Y4被置位,夹钳开始夹持,定时器T0启动,经过1.7s后,定时器的触头接通,状态由S21转换为S22,机械手上升。系统如此一步一步按顺序运行。当机械手返回到原位时X21变为ON,状态由S27转换为S0,机械手自动进入新的一次运行过程。因此机械手能自动连续运行。从图10-15所示的顺序功能图中可以看出,每一状态继电器都对应机械手的一个工序,只要弄清工序之间的转换条件及转移方向就很容易、很直观的画出顺序功能图。其对应的步进指令梯形图也很容易画出。
2.3.3 基本指令、初始状态指令和步进指令配合的编程方法

初始状态指令顺序控制的程序如图10-16所示。图(a)为初始化程序,它保证了机械手必须在原位才能进入自动工作方式。图(b)为手动方式程序,机械手的夹紧、放松及上下左右移行由相应的按钮完成。在图(c)回原位方式程序中,只需按下回原位按钮即可。图中除初始状态继电器外,其它状态继电器应使用回零状态继电器S10~ S19。图(d)为自动方式程序,M8041和M8044都是在初始化程序中设定的,在程序运行中不再改变。
下面是图10-16对应的语句表程序。

2.4 运行并调试程序
2.4.1 基本指令顺序控制程序
(1) 将梯形图程序输入到计算机。
(2) 对程序进行调试运行。
a.将转换开关SA旋至“手动"档,按下相应的动作按钮,观察机械手的动作情况;
b.将转换开关SA旋至“回原位"档,按下回原位按钮,观察机械手是否回原位;
c.将SA旋至“单步"档,每按起动按钮,观察机械手是否向前执行下一动作;
d.将SA旋至“单周期"档,每按一次起动按钮,观察机械手是否运行一个周期就停下;
e.将SA旋至“连续"档,按下起动按钮,观察机械手是否连续运行。
(3) 记录调试程序的结果。
2.4.2 基本指令与步进指令控制程序
(1) 将顺序功能图转换为梯形图输入到计算机。
(2) 对程序进行调试运行。
将转换开关SA旋至“连续"档,先按回原位按钮,再按起动按钮,观察机械手是否连续运行。
(3) 记录调试程序的结果。
2.4.3 基本指令、初始状态指令配合步进指令顺序控制程序
(1) 将控制程序输入到计算机。
(2) 对程序进行调试运行与基本指令顺序控制程序的相同。
(3) 记录调试程序的结果。
西门子6SL3130-7TE28-0AA3
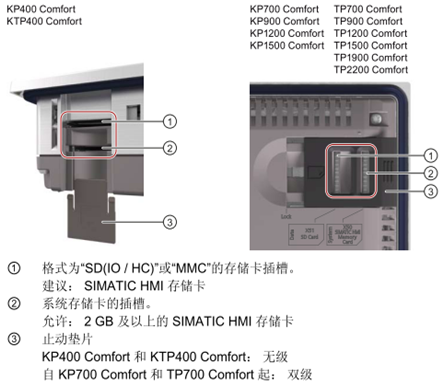
系统存储卡
系统存储卡在设备的操作界面中不可见。必须将它插入规定的插槽内,操作设备才能识别。精智面板存储卡插槽的位置如下图所示(其中②为系统存储卡的位置):
 西门子TP1500显示屏
西门子TP1500显示屏
图2存储卡插槽的位置
2 测试环境
软件:WinCC Professional V11 sp2 update5 简称 V11
WinCC Profressional V12 sp1 ypdate4 简称 V12
WinCC Profressional V13 简称 V13
硬件:TP900&KTP700、系统存储卡(格式为FAT32)
3 如何备份
首先放置系统存储卡到设备的相应插槽,如果使用的软件版本是 V11,请在设备控制面板的“OP Properties"选项卡“System Card"中激活服务方案。如下图所示:
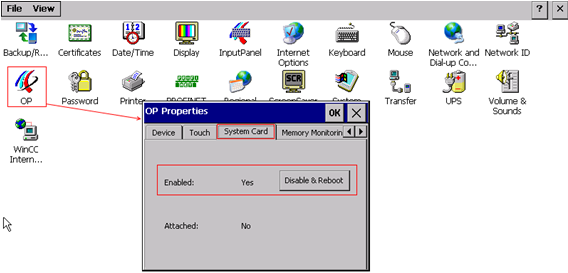
图3激活服务方案
如果使用的软件版本是 V12或 V13,请在设备控制面板的“Service & Commissioning"选项卡“Automatic Backup"中激活服务方案。如下图所示:
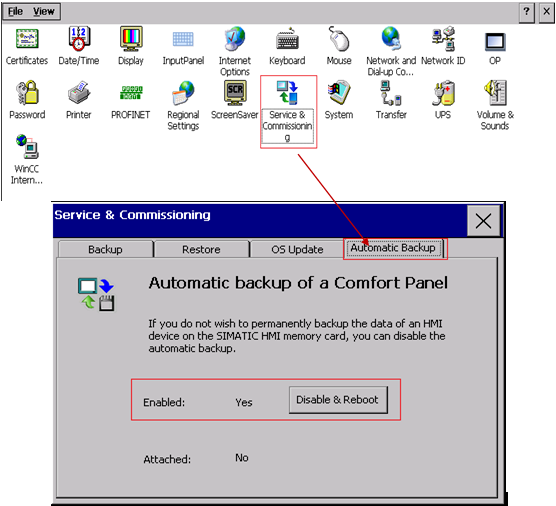
图4激活服务方案
当插入系统存储卡后,激活服务方案。设备会弹出如下界面:
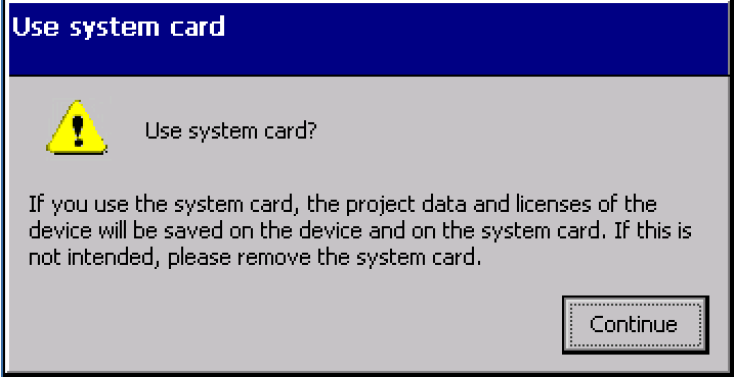
图5使用系统卡
点击“Continue"执行备份,会弹出备份过程画面。如下图所示:

图6 备份
该进度执行完后,设备会自动重新启动。至此完成了程序的*备份。并且设备的服务方案处于激活状态,系统存储卡上的数据会连续自动更新。用户可以在设备控制面板中查看状态。如下图所示:
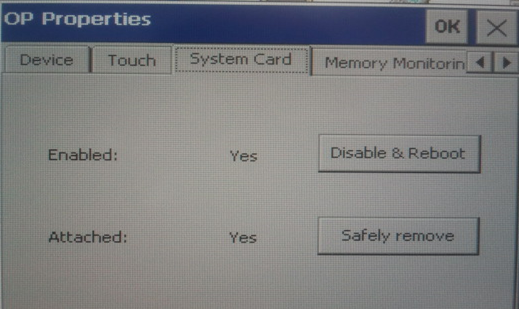
图7 系统存储卡状态(V11)
图8系统存储卡状态(V12或V13)
如果要取出系统存储卡,请首先点击图7或图8中的“Safely remove"按钮。当出现如下提示时再取出系统存储卡。
此时系统存储卡上已经包含了备份的信息。
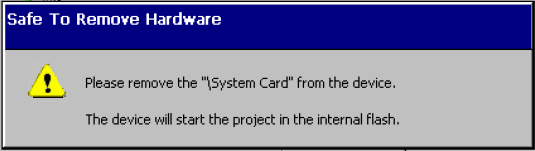
图9安全取出存储卡
4 如何恢复
执行恢复操作之前请确保新设备上的服务方案已经激活。参照图3或图4所示。当把包含有程序备份的系统存储卡插入新设备后,
如果新设备上没有运行程序,启动设备会出现如下提示界面:
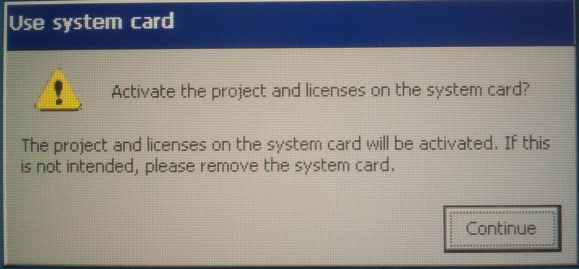
图10 备份界面
如果新设备上有已经运行的程序,系统会提醒是否执行对当前设备上程序的备份。在此处可以选择把当前运行的程序备份到
另外的卡上(X51插槽或 USB接口上的存储卡)。如果想备份当前的程序,激活“Start Backup"后系统会列出当前可用的存储卡。
选择相应的存储卡,然后点击“Continue"按钮,系统会先备份当前设备上的程序,然后再接着执行恢复。如下图所示:
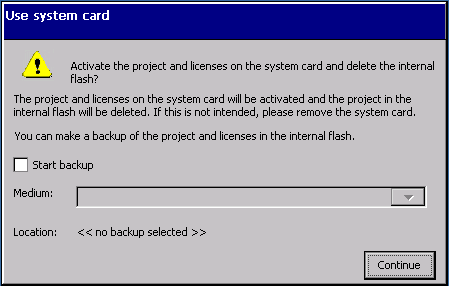
图11 备份界面
如果不想备份当前设备上运行的程序,直接点击上述界面的“Continue"按钮,系统就会执行恢复。恢复界面如下图所示:
图12 恢复