
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
6ES7313-5BG04-0AB0详细说明
SIMATIC S7-1500 中集成有诊断功能,无需再进行额外编程。统一的显示机制可将故障信息以文本方式显示在TIA博途、HMI、Web server和CPU 的显示屏上。
一键生成诊断信息
只需简单一击,无需额外编程操作,既可生成系统诊断信息。整个系统中集成有包含软硬件在内的所有诊断信息。
统一的显示机制
无论是在本地还是通过Web 远程访问,文本信息和诊断信息的显示都*相同,从而确保所有层级上的投资安全。
接线端子/ LED 标签的1:1 分配
在测试、调试、诊断和操作过程中,通过对端子和标签进行快速便捷的显示分配,节省了大量操作时间。
通道级的显示机制
发生故障时,可快速准确地识别受影响的通道,从而缩短了停机时间,并提高了工厂设备的可用性。
TRACE 功能
TRACE 功能适用于所有CPU,不仅增强了用户程序和运动控制应用诊断的准确性,同时还优化了驱动装置的性能
内置CPU 显示屏
可快速访问各种文本信息和详细的诊断信息,以提高设备的可用性同时也便于全面了解工厂的所有信息
标准前连接器
标准化的前连接器不仅简化了电缆的接线操作,同时还节省了更多的接线时间。
集成短接片
通过集成短接片的连接,可以更为灵活便捷地建立电位组。
集成DIN 导轨
可快速便捷地安装自动断路器、继电器之类的其它组件。
灵活电缆存放方式
凭借两个预先设计的电缆定位槽装置,即使存放粗型电缆,也可以轻松地关闭模块前盖板。
预接线位置
通过带有定位功能的转向布线系统,无论是初次布线还是重新连接,都非常快速便捷。
集成的屏蔽夹
对模拟量信号进行适当屏蔽,可确保高质量地识别信号并有效防止外部电磁干扰。同时,使用插入式接线端子,无需借助任何工具既可实现快速安装。
可扩展性
灵活的可组装性以及向上兼容性,便于系统的快速扩展,从而在更大程度上确保了投资回报和投资安全性。
编辑
SIMATIC S7-1500 中提供一种更为全面的安全保护机制,包括授权级别、模块保护以及通信的完整性等各个方面。
“信息安全集成"机制除了可以确保投资安全,而且还可持续提高系统的可用性。
加密算法可以有效防范未经授权的访问和修改。这样可以避免机械设备被仿造,从而确保了投资安全。
可通过绑定SIMATIC 存储卡或CPU 的序列号,确保程序无法在其它设备中运行。
这样程序就无法拷贝,而且只能在的存储卡或CPU 上运行。
访问保护功能提供一种全面的安全保护功能,可防止未经授权的项目计划更改。采用为各用户组分别设置访问密码,确保具有不同级别的访问权限。此外,安全的CP 1543-1 模块的使用,更是加强了集成防火墙的访问保护。
系统对传输到控制器的数据进行保护,防止对其进行未经授权的访问。控制器可以识别发生变更的工程组态数据或者来自陌生设备的工程组态数据。
6ES7313-5BG04-0AB0详细说明
1 路径插补功能简介
1.1 基本概念
插补的概念源于数控机床。在数控机床中,刀具不能严格地按照要求加工的曲线(直线)运动,只能用折线轨迹逼近所要加工的曲线。机床数控系统依照一定方法确定刀具运动轨迹的过程,叫做插补。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,或者称为“数据点的密化"。插补的动作过程:在每个插补周期(极短时间,一般为毫秒级)内,根据指令、进给速度计算出一个微小直线段的数据,刀具沿着微小直线段运动,经过若干个插补周期后,刀具从起点运动到终点,完成轮廓的加工。
路径运动初来自于机器人和CNC领域,用机器人编程语言或G-Code编程。它是指在多维空间中,通过一组轴的协作动作,各轴之间无主从之分,它们按照设定的动态响应特性,实现路径对象从起点到终点的的路径轨迹运动。
路径插补产生路径的运行轨迹,计算插补周期内的路径插补点,并通过机械运动系统转换获得对应插补周期内插补点的各路径轴设定值。
隶属于机械运动系统的单独轴在S7 technology中被为路径轴,路径轴通过路径对象执行路径运动。参考图1 路径轴与路径对象。
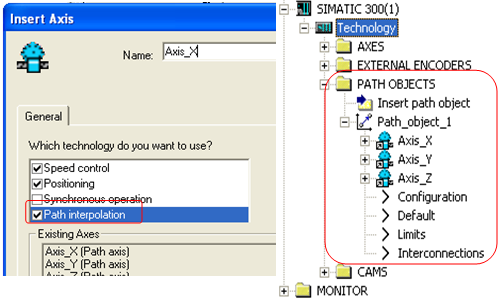
图1 路径轴与路径对象
1.2 S7-Technology 路径功能特点
S7-Technology 路径插补功能概述:
> 从S7-Technology V4.2开始
> 允许进行3轴插补操作
> 路径插补可以通过直线、圆弧、多项式表示实现
> Move Path命令可以组成连续运动
> 支持多种机械运动学模型
> 可以与外部位置值同步,实现传送带跟踪功能
S7-Technology 路径插补的技术特点:
> 所有的路径轴都相互同步移动
> 所有的路径轴都同时到达目标位置
> 路径轨迹的移动,将会始终是以一个固定的合成速度进行 (如果动态
特性限制没有被超越)
> 速度性能的轴,决定了整个轨迹的动态特性
路径差补可以执行多3轴之间的2D或者3D的线性、圆弧或者多项式插补,路径差补工艺对象(TO) ,适用于机械运动学控制范畴,一个共同的系统中,可以存在多个机械运动学控制结构。同步于路径轴的“同步轴",仍然可以实现同步控制,例如,旋转,凸轮开关,测量功能。通过图形化编辑器,可以简便地设置机械运动学控制系统的参数;通过动态特性轮廓窗口,可以轻松定义路径的动态特性;通过轨迹点表格,可以轻松定义路径差补,计划目的地路径。另外还可以定义保护防撞区域和实现传送带位置的跟踪。
1.3 机械运动系统的选择
T-CPU 所实现运动学,等同于人们过去所熟悉机械运动学。可以将它们分为如下两种不同的类型。参考图2 在 T-CPU 中集成的机械运动学。
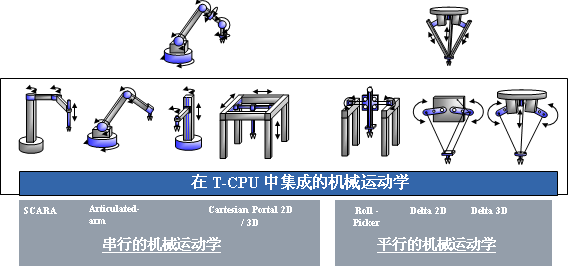
图2 在 T-CPU 中集成的机械运动学
不同的机械运动系统可以实现TCP (Tool Center Point,工具中心点或机械运动端点)相同的路径运动功能。尽管在某些情况下,不同的机械运动系统可实现相同的路径运动,但是,如果机械运动系统选择不合理,将有可能无法完成的路径功能。所以,必须根据实际的工艺需求选择合适的机械运动系统,并在工厂布局中考虑该机构的的合理安装位置。参考图3 不同机械系统的转化。
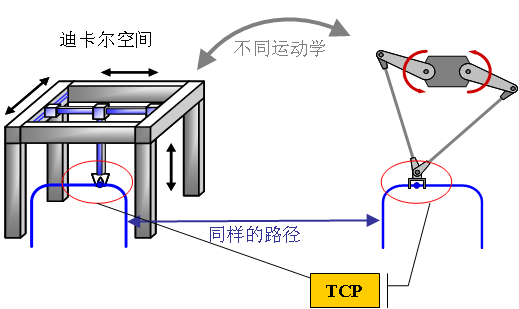
图3 不同机械系统的转化
2 路径插补的实现方法
2.1 运动学模型简介
常用的运动学模型请参考图 4 运动学模型。
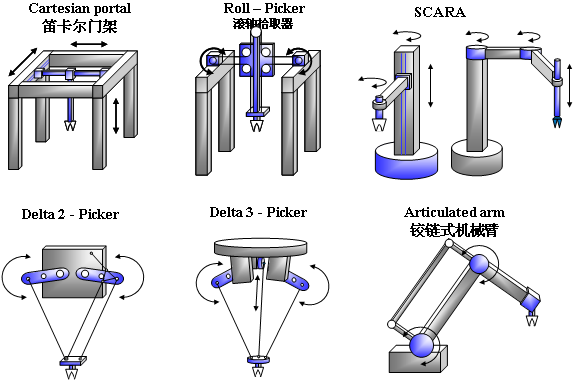
图 4 运动学模型
下面介绍一些常用的运动学模型。直角坐标机器人 (英文名:Cartesian coordinate robot),大型的直角坐标机器人也称桁架机器人或龙门式机器人,由多个运动自由度建成空间直角关系的、多用途的操作机器。工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。参考图5 直角坐标机器人。
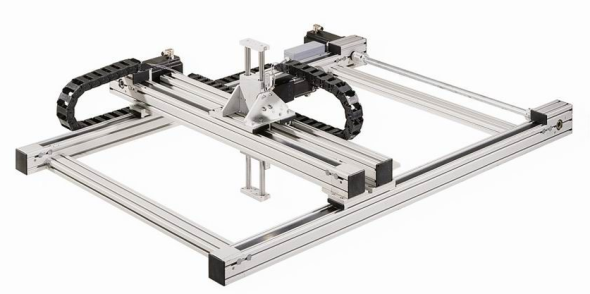
图5 直角坐标机器人
SCARA 机器人(Selective Compliance Assembly Robot Arm)是一种圆柱坐标型的特殊工业机器人。有3个旋转关节,其轴线相互平行,在平面内进行定位,另一个关节是移动关节,用于完成机械末端在垂直平面的运动。SCARA机器人在x,y方向上具有良好的顺从性、灵活性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。SCARA机器人广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。 参考图6 SCARA 机器人。
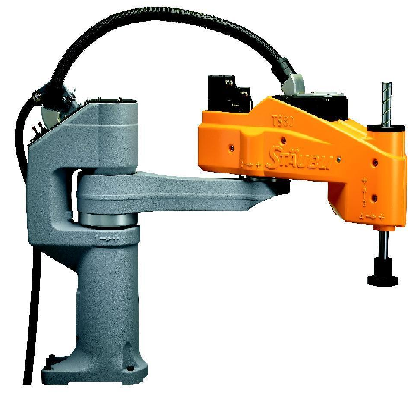
图6 SCARA 机器人
铰链型机械臂:有很高的自由度,可以多至5~6轴,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作, 提高生产效率;可以代替很多不适合人力完成、有害身体健康的复杂工作,比如,汽车外壳点焊。参考图 7 铰链型机械臂。

图7铰链型机械臂
Delta 3D机器人:外形酷似一只蜘蛛,这种*的几何结构赋予了它们质量轻,强度大,轻便灵活,节省空间,高速,敏捷;适用于高速分拣。参考图8 Delta 3D机器人。

图8 Delta 3D机器人
2.2 路径插补实现方法
首先需要做轴的定义,选择“Path interploation"。参考图 9 路径轴的定义。
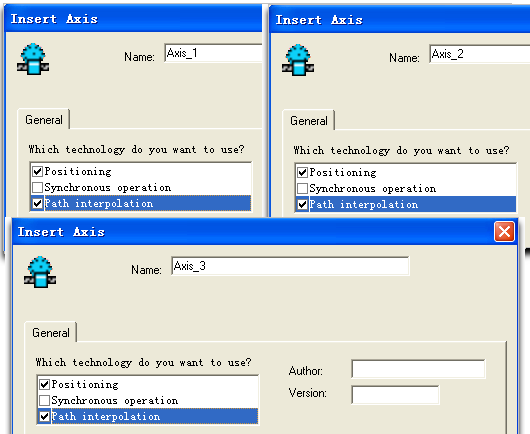
图9 路径轴的定义
然后双击“Insert path object"插入路径对象。路径对象是路径插补及与路径插补相关的其他任务的客体,路径对象也包括机械运动系统转换。参考图10 插入路径对象。
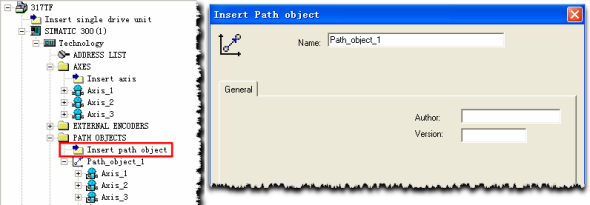
图10 插入路径对象
路径对象生成后,需要执行轴的关联。路径轴与其他路径轴一起,通过路径对象执行路径运动。参考图11 路径轴的关联。在该图中,路径轴Axis_1、Axis_2、 Axis_3同属于路径对象Path_object_1。
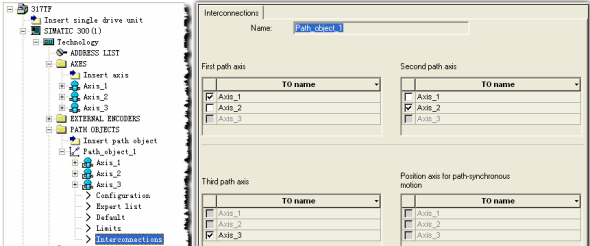
图11 路径轴的关联
路径轴关联后,需要选择对应的机械模型,通过组态,T-CPU自动完成目标坐标系与机器坐标系的转换。参考图12 机械模型的选择。工艺组态完成后,会自动生成各个轴以及路径对象的工艺DB,参考图13 工艺DB。然后就可以调用相应的功能块进行程序的编写工作。
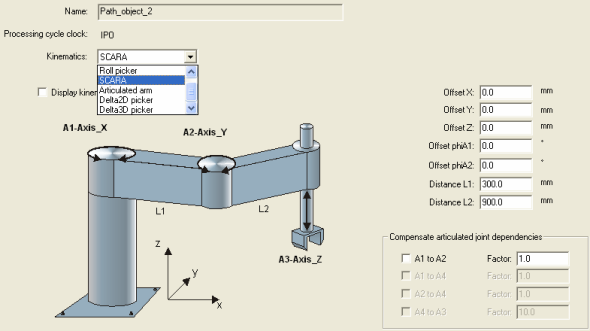
图12机械模型的选择
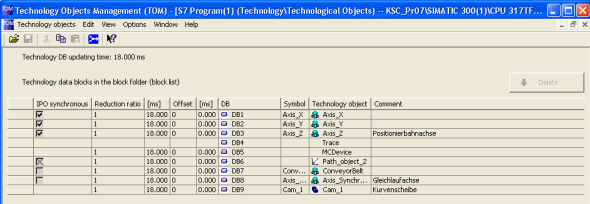
图13 工艺DB
2.3 坐标系的转换
坐标系是描述路径及任何位置信息的必要条件。在路径插补功能中,涉及三个坐标系的转换。分别是基础坐标系、机器坐标系和目标坐标系。基础坐标系描述了机械运动系统在空间的安装视图,参考图14的红色标示;机器坐标系描述了路径轴的位置视图,参考图14的黑色标示;目标坐标系描述了路径运动的物体或工件的本地视图,参考图14的蓝色视图。目标坐标系能与运动的传送带轴同步运动。路径对象的运动命令的位置信息在目标坐标系中或在基础坐标系中。
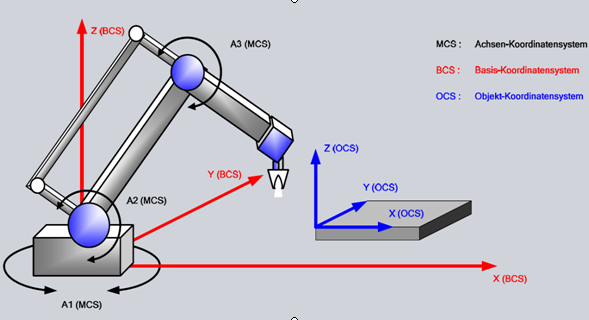
图14 三种坐标系
在T-CPU 的路径对象中,可以通过 Offset (偏移量)来设定基本坐标系的位置,该偏移量的计算是从运动学对象的零点起始,直到基本坐标系(BCS)的原点为止。如图15 坐标系转换示例,X轴偏移值Offset X = 250+50 = 300,Y轴偏移值 Offset Y= -550+50 = -500,Z轴偏移值 Offset Z = -1100+50+200 = -850。计算完成坐标系偏移值后,需要在组态中填入这些偏移值,参考图16 偏移量设定。
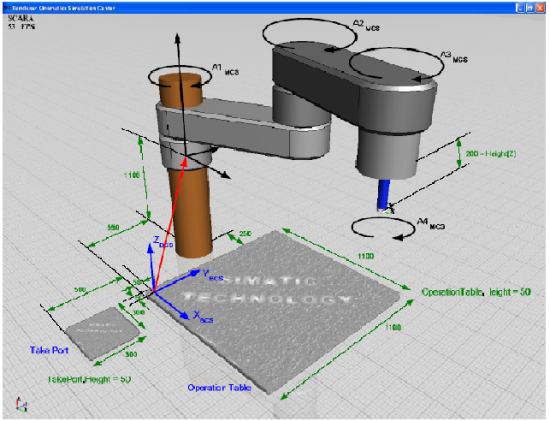
图15 坐标系转换示例
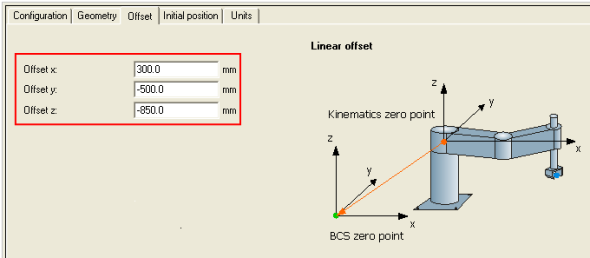
图16 偏移量设定
在坐标系转换中,不仅要考虑到坐标系本身的偏移,还要考虑具体的机械结构和机械臂的初始位置。以SCARA系统为例,有两个臂长L1, L2,需要在组态中填写这两个长度。参考图17 SCARA 臂长设定。在初始位置,机械臂相对于零点位置和机械臂之间可能有角度上的偏移,参考图18 机械臂角度偏移,需要在组态中去设置这个偏移角度,参考图19 机械臂角度偏移设置。
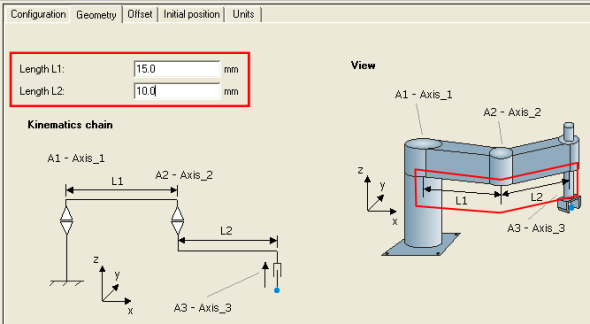
图17 SCARA 臂长设定
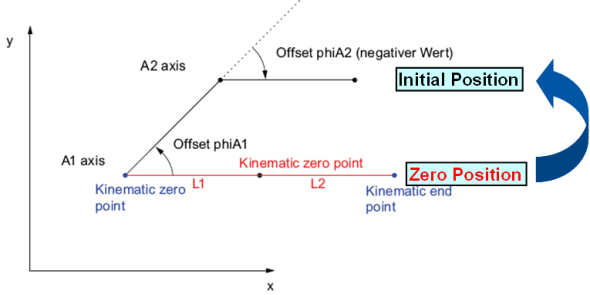
图18 机械臂角度偏移
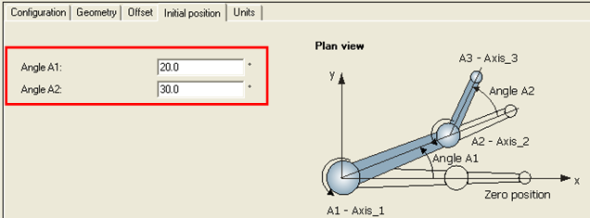
图19 机械臂角度偏移设置