
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
6ES7317-2AK14-0AB0参数详细
1 现象描述
在许多项目中,经常会使用DP/DP Coupler来实现2个DP主站之间的DP网络通信,而且2个DP主站也是由两方合作一起完成数据交换。


DPDPCoupler.rar (795,1 KB)
但是,该通信方式是需要双方合作才能完成实现的,只要有一方通信设置出现问题,就无法完成2个DP网络之间的正常通信,同时还无法判断由哪方来承担该通信方式出错的责任。
鉴于这种现象,本文档设计了一个方法,可以自己测试自己的DP/DP Coupler的DP网络是否设置正确。
2 测试方法 2.1 组态设置
都知道DP/DP Coupler用来实现2个 DP网络之间的通信,在合作双方的实际情况中,任何一方的DP主站系统中,DP网络都只是下挂1个DP/DP Coupler。如下图所示。

图2-1
而本文档设计的方法,就是借用合作方的使用的DP/DP Coupler的DP接口,即将DP/DP Coupler的2个DP接口都纳入到自己的DP系统网络中。如下图所示。

图2-2
那么,在自己的DP网络系统继续添加一个相同的DP/DP Coupler,即本DP网络下挂2个DP/DP Coupler,DP地址就是DP/DP Coupler模块播码的地址。如下图所示。

图2-3
如图2-3所示,分别点击7号和8号,为两个站分配相应的I/O传输地址。需要注意:7号站首行是输入32个字节,那么8号站首行必须是对应输出32个字节;7号站第二行是输出32个字节,那么8号站第二行必须是对应输入32个字节。

图2-4
将测试组态好的项目,下载到CPU中。
2.2 通信测试
在项目中新建2个变量表,分别取名7号站和8号站,如下图所示。

图2-5
在7号站变量表中,新建10个输入(IB0-IB9)和10个输入(QB0-QB10),在8号站变量表中,新建10个输入(IB32-IB41)和10个输入(QB32-QB41)。如下图所示。

图2-6
给QB0-QB10分别赋值B#16#01——B#16#10,给QB32-QB41分别赋值B#16#11——B#16#20。如下图所示。可以看到,7号站和8号站,分别接收到对方发生过来的数据。

图2-7
如果这种测试可以成功,表示自己项目的DP/DP Coupler的配置就是正确的
6ES7317-2AK14-0AB0参数详细
SIMATIC Assessment Suite - Data Collector (SAS-DC)-原名为SIMATIC Diagnostics Tool (SDT)-可以帮助用户简单而又容易地从计算机或其它设备收集诊断信息和系统信息。
可以从本地系统或者网络中的系统收集诊断信息和系统信息。 这些诊断信息和系统信息存储在系统特定的归档里。
功能
从系统收集诊断信息和系统信息
以ZIP格式归档收集的信息,按不同系统归类
通过组态工具(Settings Manager)收集特定系统组态的数据信息
设置保存到组态文件中
优点
可以快速收集大量诊断信息和系统信息
收集只需一次"点击"。这样就省去了耗时的对每个系统的诊断信息和系统信息的手动收集
无需安装
配置可以保存并再次使用
配置可以转发
运行这个工具后,所有已组态系统的诊断信息和系统信息可以在一台计算机上集中获取
系统要求
可以运行在标准Windows操作系统上
数据收集
从本页下载"SDT2016_1.zip" 文件到你的系统并解压到你选择的文件夹,比如,"D:\Diagnose"。
| 从本地系统的数据收集 | 通过网络的多系统收集数据 |
启动工具。 点击"Start Collecting"。 一个归档文件会创建在子目录下。
| 启动工具并进入Settings Manager。 为系统创建配置文件并组态。 保存配置。 进入"Collector"选项卡并点击"Start Collecting"。 会在子目录下给每个配置文件创建一个归档文件。
|
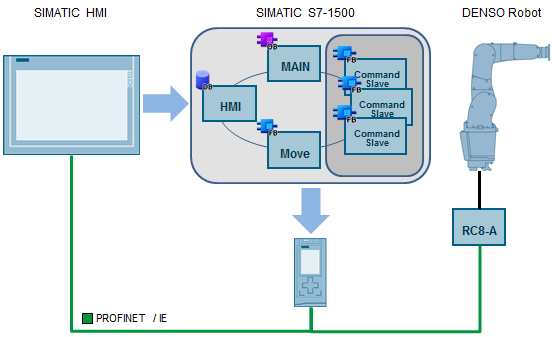
图. 01
PLC 程序通过 "Command Slave" 功能包提供的功能库对机器人进行控制。这些功能块遵循类似于 PLCopen 的标准,与 SIMATIC CPU 集成的运动控制功能相似。机器人可以通过库里的功能块进行启动和监控,并执行基本的运动指令,如点到点运动、直线或圆周运动等。
机器人受机器人控制器控制, "Command Slave" 功能包包含一个命令注释器并安装在机器人控制器上,用于将PLC程序命令传送给机器人。这就确保 RC8-A 机器人控制器的所有运动功能和相关的安全功能为可用状态,并且机器人可以独立于 SIMATIC CPU 负荷执行一般精度的运动功能。
"Command Slave" 功能包在所有装有 RC8-A 控制器的机器人上都可使用。

图. 02
当机器人运动是面向事件的并且适用于要执行的任务时,该功能包非常适用于各种手臂应用和简单的轮廓线运动。
使用该功能包有如下优点:
所有功能组件,如 SIMATIC 控制器和机器人控制器都通过 PROFINET 连接。
机器人集成在 TIA 博途环境中。
机器人在工厂标准中的简单集成,包括安全功能。
通过一台 HMI 可以对整个工厂的所有机器人进行灵活的和故障安全的操作。
电装机器人欧洲公司提供的功能包适用于 STEP7(TIA博途)环境下的 SIMATIC S7-1500 控制器。控制器对于每台机器人均可以使用至少 256 字节的地址空间。