
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
西门子模块6AV2123-2MB03-0AX0
辅助工艺功能
该技术功能包中的工艺对象功能可通过附加语言命令和系统变量以及符合 PLCopen 的函数块来访问。因此,运动顺序的编程较为简单且集成程度较高。
温度控制工艺功能包 (TControl)
SIMOTION 温度控制工艺功能包提供了功能丰富的温度通道。这些功能同样通过附加语言命令和系统变量进行访问。
传动控制图 (DCC) 工艺功能包
SIMOTION 传动控制图 (DCC) 工艺功能包提供了一个“驱动控制块"(DCB) 库。借助这些控制块,可以在选配的 DCC 编辑器中以图形化的方式配置开环和闭环控制功能,该编辑器可集成到 SCOUT。SCOUT TIA(TIA Portal 中的 SIMOTION)没有 DCC。
多功能信息接口 (MIIF) 工艺功能包
SIMOTION MIIF 工艺功能包可充当服务器,支持以符号化方式访问 SIMOTION 数据并通过以太网将数据提供给客户端(例如,操作面板)。
SIMOTION I/O 交互功能库
这些功能库包含用于集成智能 I/O 和通信模块的标准功能。它们是 SCOUT 命令库的组成部分,可非常方便地将模块(如 FM 350-1/-2、FM 352、CP 340/341、SIWAREX FTA)或识别系统集成到 SIMOTION 用户程序中。SIMOTION Utilities & Applications 中也提供了编程示例和标准应用。The SIMOTION Utilities & Applications 随 SCOUT 免费提供。
SIMOTION运动控制系统采用了高性能的CPU,该CPU上具备了一个适合于快速控制过程的实时的操作系统。
这种实时操作系统可对包含不同执行层次的执行系统进行组织。
执行系统
SIMOTION 执行系统会区分系统执行层和用户执行层(任务):
对系统进行总体操作所需的系统任务处理操作。通过工艺对象,将在 SERVO、IPO 和 IPO2 系统任务中执行闭环位置控制和特性参数计算。
系统会定期执行系统任务。可以系统循环时钟。
具有不同执行特性的执行层可用于与任务有关的用户编程(用户程序任务)。
执行层定义了执行系统中程序的时间顺序。每个执行层都包含一个或多个任务。具体用户程序分配给这些任务。
所有程序(因而所有任务)都可执行 PLC、工艺和运动控制任务。
任务相关执行的任务类型为:
同步任务
循环任务
顺序任务
时间触发的任务,以及
中断驱动的任务
同步任务与系统任务以及变频器的控制循环或等时同步 PROFIBUS/PROFINET 平行运行。
借助于这些同步任务,整个应用处于等时同步模式下(应用程序 ↔ 驱动器 ↔ I/O)。其结果是反应时间短,并且该应用易于复写。
应用程序具有以下执行层:
启动任务
一旦操作模式从停止过渡到运行,StartupTask立即执行,控制系统启动。
背景任务
BackgroundTask是循环执行的,并应用于一般的PLC任务。周期时间监控检测BackgroundTask的大处理时间。BackgroundTask 相当于 SIMATIC 控制系统的 OB1。
运动任务
MotionTasks 用于运动序列。
同一MotionTask中,指令序列通常连续执行,例如,下一指令仅在当前指令完成时才开始。
在这些等待时间期间,MotionTasks 不需要任何 CPU 时间,但会在接收到等待事件时立即做出响应。
同步任务
在伺服同步用户任务中,可在伺服级实现对时间要求严格的终端-终端 I/O 响应,或快速影响整定值(与技术功能对象(如位置控制器)的系统循环 SERVO 同步)。
IPO 同步用户任务在插补循环 IPO 或减速循环 IPO2 前可即时同步开始执行。
可实现快速的运动控制反应以及闭环控制任务,这些闭环控制任务中,实际值的度和设点的输出必须同步。
技术功能对象的参考变量在系统循环 IPO 和 IPO2 中进行计算。
因此,用户程序与驱动的控制周期和I/O的处理同步。同步确保了短反应时间,尤其是确定性的、可重现的机器行为。
DCC 任务
驱动控制图(选项)采用上述的同步任务。此外,能在各个块上分配更高的同步执行水平(DCC的特殊任务)。
中断任务
有几个时间控制任务。呼叫周期是参数化的。定期执行的任务通常放在此处。
搣中断任务攠
InterruptTasks 用于快速响应利用中断发出信号的内部事件。InterruptTasks 可由系统中断(如报警和超时)激活,或由用户中断激活。
关机任务
当过渡到停止模式时,调用ShutdownTask。可在此处定义转换到此系统状态的特定行为。
所有任务都可有一套完整的指令。例如,可在当前定位指令上添加另一运动,它是来自由用户中断任务触发的MotionTask:
SIMOTION应用的任务结构
西门子模块6AV2123-2MB03-0AX0
绝对式编码器码盘
绝对式编码器的特点是不需要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码,即直接读出角度坐标的绝对值。另外,相对于增量式编码器,绝对式编码器不存在累积误差,并且当电源切除后位置信息也不会丢失。
一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中应用比较广泛。
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑 1 时输出电压为 0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑 1 时,输出电压为电源电压,如图2-2所示)两种形式。在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。
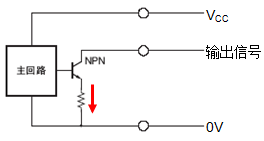
图2-1 NPN 集电极开路输出
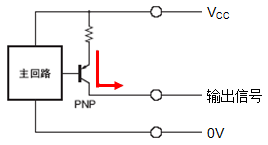
图2-2 PNP集电极开路输出
对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。
注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
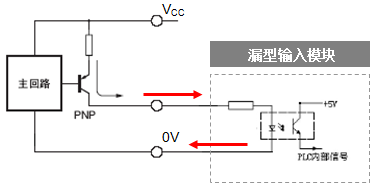
图2-3 PNP型输出的接线原理
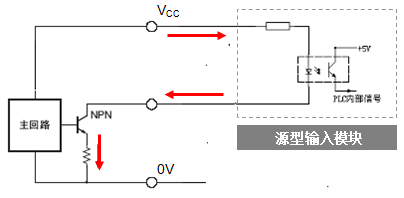
对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。
注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。
 西门子EM AM06模块
西门子EM AM06模块
图2-4 NPN型输出的接线原理
电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。
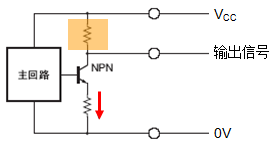
图2-5 电压输出型
推挽式输出方式由两个分别为 PNP 型和 NPN 型的三极管组成,如图2-6所示。当其中一个三极管导通时,另外一个三极管则关断,两个输出晶体管交互进行动作。
这种输出形式具有高输入阻抗和低输出阻抗,因此在低阻抗情况下它也可以提供大范围的电源。由于输入、输出信号相位相同且频率范围宽,因此它还适用于长距离传输。
推挽式输出电路可以直接与 NPN 和 PNP 集电极开路输入的电路连接,即可以接入源型或漏型输入的模块中