
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
西门子CPU模块6ES7511-1TK01-0AB0技术参数
SIEMENS 可编程控制器
哪里有卖 要多少钱 哪里有 哪里能买到 要在哪里买 在哪里有卖的 价格,参数,型号,哪家便宜,比较便宜,哪里有,销售,订货号,多少钱?哪家价格好? 厂家,性能,优点,包装,用途,售后服务!哪里有卖 代理商 总代理
S7-200 SMART CPU 模块本体直接提供三轴100KHz 高速脉冲输出,通过强大灵活的设置向导S7-200 SMART CPU 模块本体直接提供三轴100KHz 高速脉冲输出,通过强大灵活的设置向导可组态为PWM输出或运动控制输出,为步进电机或伺服电机的速度和位置控制提供了统一的解决方案,满足小型机械设备的精确定位需求。

S7-200 SMART CPU 提供了三种开环运动控制方法:
• 脉冲串输出 (PTO) :内置在 CPU 的速度和位置控制。此功能仅提供脉冲串输出,方向和限值控制必须通过应用程序使用PLC 中集成的或由扩展模块提供的 I/O 来提供。请参见脉冲输出PLS 指令。
• 脉宽调制 (PWM):内置在 CPU 的速度、位置或负载循环控制。若组态 PWM 输出,CPU 将固定输出的周期时间,通过程序控制脉冲的持续时间或负载周期。可通过脉冲持续时间的变化来控制应用的转速或位置。请参见脉冲输出PLS 指令。
• 运动轴:内置于CPU 中,用于速度和位置控制。 此功能提供了带有集成方向控制和禁用输出的单脉冲串输出,还包括可编程输入,并提供包括自动参考点搜索等多种操作模式。

PWM 和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM 向导设置根据用户选择的PWM 脉冲个数,生成相应的PWMx_RUN 子程序框架用于编辑。
运动控制向导更多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。
运动控制功能特点
• 提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
• 提供可组态的反冲补偿
• 支持、相对和手动位控模式
• 支持连续操作
• 提供多达32 组运动动包络,每组包络更多可设置16 种速度
• 提供4 种不同的参考点寻找模式,每种模式都可对起始的寻找方向和更终的接近方向进行选择

运动控制的监控
为了帮助用户开发运动控制方案,STEP 7- Micro/WIN SMART 提供运动控制面板。其中的操作、组态和包络组态的设置使用户在开发过程的启动和测试阶段就能轻松监控运动控制功能的操作。
• 使用运动控制面板可以验证运动控制功能接线是否正确,可以调整组态数据并测试每个移动包络
• 显示位控操作的当前速度、当前位置和当前方向,以及输入和输出LED(脉冲LED 除外)的状态
• 查看修改在CPU 模块中存储的位控操作的组态设置
西门子CPU模块6ES7511-1TK01-0AB0技术参数
参数化串口 CP
在 SIMATIC Manager 中打开 SIMATIC S7-300 站的硬件组态。在硬件目录中选择串口 CP,比如 CP341。拖动并放置其到 S7-300 站机架的一个插槽中。
双击 CP341 来打开 CP341 的属性对话框。
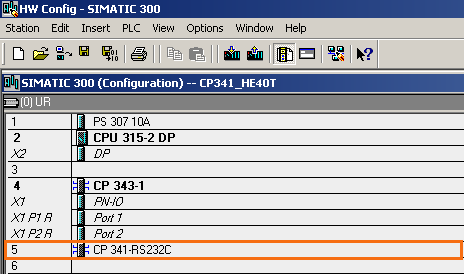
图 01
在 CP341 的属性对话框中,切换到 'General' 选项卡。点击 'Parameter...' 图标后开启 CP341 的 PtP Param 组态软件。

图 02
选择 ASCII 协议。然后双击代表协议的信封图标来打开 'Protocol' 对话框,进行特定协议的设置。

图 03
在 'Protocol' 对话框中选择 'ASCII' 选项卡。设置通信速率和字符帧以使其与手持读码器的参数匹配。例如:
波特率:9600 bits/s
数据位:8
停止位: 1
校验: 无
点击 'OK' 按钮来应用设置及完成对 CP341 的参数化。
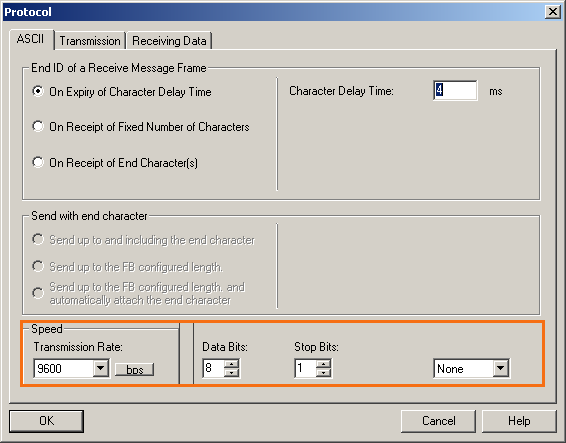
图 04
保存并编译 S7-300 站的配置。然后将配置下载到 S7-300 CPU。
关闭硬件组态。
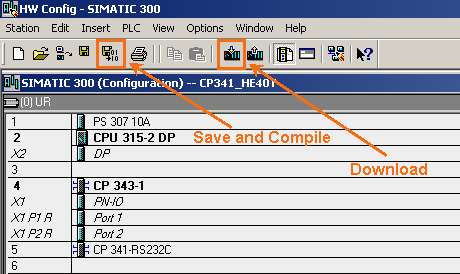
图 05
在 S7-300 CPU 的用户程序中调用功能块
为了通过 S7-300 CPU 的 CP341 接收来自手持读码系统的数据,在 S7-300 CPU 的用户程序中调用功能块 FB7 'P_RCV_RK'。
FB7 'P_RCV_RK' 位于库文件 'CP PtP' 下的文件夹 'CP 341 > Blocks' 中。
在 SIMATIC Manager 中通过菜单 'File > Open' 打开 'CP PtP' 库。
'Open Project' 对话框中选择 'Libraries' 选项卡。
选择 'CP PtP' 库并点击 'OK' 按钮。

图 06
从库中复制 FB7 'P_RCV_RK' 并将其插入到 S7 程序的块中。
本例程是在 FC100 中调用 FB7 'P_RCV_RK'。FC100 是在OB1 中被循环调用的。
将块的 EN_R 输入端置为 'TRUE' 以便 CP341 可以在任意时刻接收到数据。
手持读码系统接收到的数据被存储在数据块 DB24 中。
输出端 NDR,ERROR 与 STATUS 是工作评估所需要的,并且在同一周期内是有效的。
输出端 'NDR' 用于显示新的数据被接收并存储在 DB24 中。如果没有成功完成读取作业,那么输出端 ERROR 被置 1 ,同时输出端 STATUS 输出错误信息。
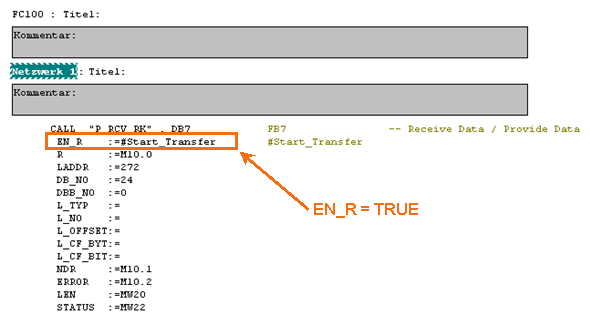
图 07
注意
如果使用的是 CP340,为了通过 在S7-300CPU中的CP340 接收手持读码器的数据,应在 S7-300 CPU 的用户程序中调用功能块 FB2 'P_RCV' 。FB2 'P_RCV' 位于库文件 'CP PtP' 下的文件夹 'CP 340 > Blocks' 中