
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子,电气 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
西门子模块6ES7513-1AL02-0AB0技术参数
组态软件控制器
3.11 参数视图
PID 控制
66 功能手册, 11/2019, A5E35300232-AE
3.11.2.2 导航
在“参数视图"(Parameter view) 选项卡中,有以下替代导航结构可供选择。
导航 说明
功能导航
在功能导航中,参数结构以组态对话框(“功能视
图"(Functional view) 选项卡)、调试对话框和诊断对话框
中的结构为基础。
最后一个组“其它参数"(Other parameters) 包括工艺对象
的所有其它参数。
数据导航
在数据导航中,参数结构以背景数据块/工艺数据块中的
结构为基础。
最后一个组“其它参数"(Other parameters) 包括背景数据
块/工艺数据库中不包括的参数。
可以使用“选择导航结构"(Select navigation structure) 下拉列表来切换导航结构
参数表
下表给出了参数表各列的含义。 可以根据需要显示或隐藏列。
● “离线"列 = X: 该列在离线模式下可见。
● “在线"列 = X: 该列在在线模式下可见(在线连接到 CPU)
通过组态 SCL 来设置 ENO
要组态 SCL 编译器以设置 ENO,请按以下步骤操作:
1. 从“选项"(Options) 菜单中选择“设置"(Settings) 命令。
2. 展开“PLC 编程"(PLC programming) 属性并选择“SCL(结构化控制语言)"(SCL (Structured Cool Language))。
3. 选择“自动设置 ENO"(Set ENO automatically) 选项。
在程序代码中使用 ENO
您还能够通过将 ENO 分配给 PLC 变量或在局部块中评估 ENO 等方式在程序代码中使用 ENO。
示例:
Ret_Val 或 Status 参数对 ENO 的影响
某些指令(如通信指令或字符串转换指令)提供一个输出参数,其中包含有关指令处理的信息。 例如,某些指令提供通常为 Int 数据类型的 Ret_Val(返回值)参数,其中包含 -32768 到 +32767 范围内的状态信息。还有些指令提供通常为 Word 数据类型的 Status 参数,其中存储十六进制值 16#0000 到 16#FFFF 范围内的状态信息。 Ret_Val 或 Status 参数中存储的数字值确定该指令的 ENO 状态。
Ret_Val:介于 0 至 32767 的值通常设置 ENO = 1(即 TRUE)。 介于 ‑32768 至 ‑1 的值通常设置 ENO = 0(即 FALSE)。 要评估 Ret_Val,将表示法更改为十六进制。
Status:介于 16#0000 至 16#7FFF 的值通常设置 ENO = 1(即 TRUE)。 介于 16#8000 至 16#FFFF 的值通常设置 ENO = 0(即 FALSE)。
需要多次扫描才能执行的指令通常提供 Busy 参数 (Bool),用于表示指令处于活动状态,但尚未完成执行。 此类指令通常还提供 Done 参数 (Bool) 和 Error 参数 (Bool)。Done 表示指令已完成且无错误,而 Error 表示指令已完成,但存在错误情况
西门子模块6ES7513-1AL02-0AB0技术参数
监控表
监控表提供丰富的功能与诊断选件。通过它们可收集项目(以及不同设备)的不同变量。监控表可清晰地显示当前值,并可对这些值进行控制。存储的控制值表也可用来快速轻松地执行各种测试序列。
诊断和故障排除
诸如 MCC 编辑器中的“跟踪"(Trace) 等功能可使程序序列变得可见和易于理解(即使带有快速的命令转换时),并使诊断和故障排查变得更加清晰明了。程序打开后选项卡中的“交谈"(Talking) 图标将指示激活的状态或调试功能。
简便编程
在一般编程中,可通过添加功能而获得更高清晰度,例如,显示变量类型,存在在线连接时显示当前值,以及光标移过代码时提供特定语言的注释(“工具提示")。
在使用表格和输入字段时,弹出的提示将指示输入错误或缺少的系统信息。
系统内有效的用户输入自动填充机制(“自动填充")可自动更正大小写,可使编辑过程更加高效,使程序代码更容易阅读。
采用项目级查找/替换功能可以快速查找所需要的变量,必要时,还可替换该变量。过滤器启动后,带有多个复选框,可以按照需要收到或展开这些复选框。
这些功能可在全部语言的编辑器中使用,例如,“转至:下一使用位置、前一使用位置、声明或其它使用位置",可以高效地查找用到的变量。
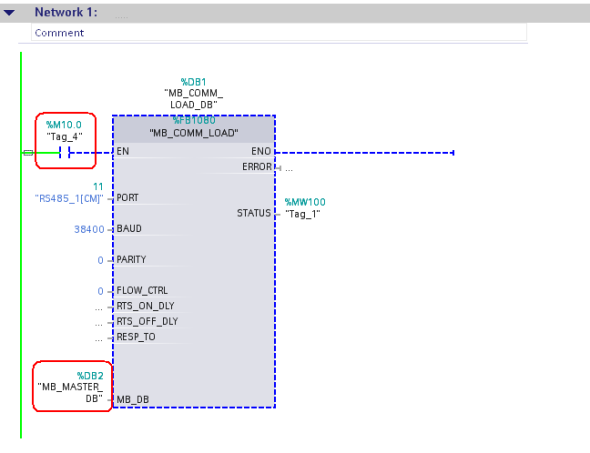
图13:MB_COMM_LOAD功能块的编程
PORT:指的是通过哪个通信模块进行MODBUS RTU通信。
BAUD:指的是和MODBUS子站进行通信的速率。
通信端口的波特率。取值范围为300,600,1200,2400,4800,9600,19200,38400,57600,
76800,115200。
注意:仪表PAC3200的波特率的设置范围:4800,9600,19200,38400。因此上S7-1200
的波特率的设置一定要和仪表PAC3200的波特率的设置相*。
MB_DB:对 MB_MASTER 或 MB_SLAVE 指令所使用的背景数据块的引用。 在用户程序中放置
MB_SLAVE 或 MB_MASTER 后,DB标识符会出现在 MB_DB 功能框连接的助手下拉列表中。
如“MB_MASTER_DB"或“MB_SLAVE_DB"。
STATUS:端口状态代码。具体含义如下表所示。
表4: MB_COMM_LOAD组态端口的状态代码
2.MODBUS_MASTER功能块的编程
MB_MASTER 功能块允许程序作为Modbus 主站使用点对点 (PtP, Point-to-Point) CM 1241 RS485 或 CM 1241RS232 模块上的端口进行通信。 可访问一个或多个 Modbus 从站设备中的数据。
MB_MASTER功能块的编程如下图所示。
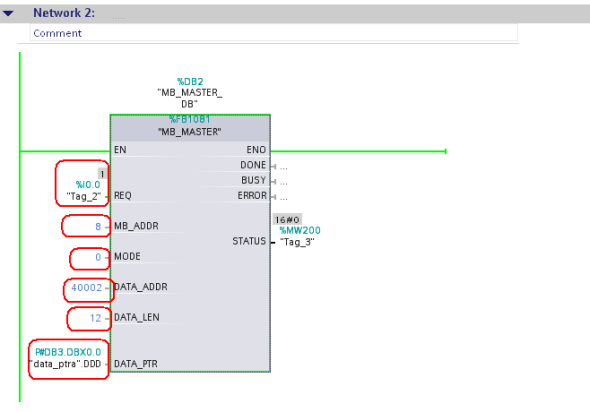
图14:MB_MASTER功能块的编程
REQ:数据发送请求信号。0-无请求。1-请求将数据传送到MODBUS从站。
MB_ADR:通信对象MODBUS从站的地址。有效地址范围为0-247。值 0 被保留用于将消息广播到所有 Modbus 从站。 只有Modbus 功能代码 05、06、15 和 16 是可用于广播的功能代码。
注意:此处MODBUS从站的地址一定要与仪表PAC3200 的MODBUS 地址相*。
MODE:模式选择。选择范围为:读、写、诊断。
DATA_ADDR:从站中的起始地址: 要在 Modbus 从站中访问的数据的起始地址。
工程软件

SIRIUS ES 工程软件 (E-SW)
固态软起动器
SIRIUS 3RW30, 3RW31
SIRIUS 3RW3 固态软起动器适用于软起动和停止三相异步电机。
通过两相控制,在整个起动时间内,所有三相电流都控制在值。当无法避免的电流和转距峰值发生时,如,使用星-三角起动器,可消除连续电压影响。
SIRIUS 3RW30,3RW31 系列设备有 4 种框架规格的 SIRIUS 3R 系统工具箱。它们有以下额定范围:
框架规格 | 用于三相电机 400 V 输出 | 用于单相电机 230 V 输出 |
|---|---|---|
S00 | 1.1- 4 kW | – |
S0 | 5.5 - 11 kW | 4 kW |
S2 | 15 - 22 kW | 5.5 kW |
S3 | 30 - 55 kW | 11 kW |
3RW30,3RW31 固态软起动器有以下三种不同版本:
标准版本 3RW30,用于带固定数目极对的电机(速度),
特殊版本 3RW31,用于变极电机(仅框架规格 S0),
单相电机(5 A)软起动版本(230 V 时11 kW)。
特征
带电压斜坡的软起动; 起动电压可设定在 40 - 100 % 之间,斜坡时间 tR 可在 0 - 20 s 之间设定。
带电压斜坡的控制关机; 关机斜坡时间 taus可在 0 - 20 s之间设定。 因此切断电压 Uaus取决于所选择的起动电压 Us 。
通过 3 个电位计的设定
安装及调试简单
主电压 50 / 60 Hz 200 V - 575 V
两种控制电压版本 24 V UC 和 110 V - 230 V UC
宽广的温度范围 -25 °C - +60 °C
内置旁路触头,用于降低功耗
框架规格 S0,S2 和 S3 有 2 个内置辅助触头,确保方便的控制以及装置内进一步处理的可能性。
设定值
装置可进行以下设定:
用于三相电机 | 用于单相电机 | ||
|---|---|---|---|
设定 | 3RW30 | 3RW31 | 3RW30 |
起动时间1,范围 0 - 20 s | 是 | 是 | 是 |
起动时间2,范围 0 - 20 s | 不 | 是 | 不 |
停止时间,范围 0 - 20 s | 是 | 不 | 不 |
起动电压,范大切换频率。 | |||
对于 3RW3 SIRIUS 软起动器和电机之间的电机馈电装置,无需安装电容元件(如补偿系统)。
所有用于正向起动和局部短路条件的主电路元件(如保护元件,开关设备和过载继电器)须根据适用系统变量选择,并单独定货。
附件
用于3RW302...,3RW303... 和 3RW304...的风扇. 风扇可简单安装在外壳的底排上。设计用于提高开关频率并可安装在非标准位置上。
用于 3RW303... 和 3RW304...盒式端子的护罩
用于 3RW304...电缆接线片和母线连接的连接护罩
连接模块
AS 接口负荷馈电装置模块
DIN 导轨适配器
用于长控制电压电缆长度的过压限制器
SIRIUS 3RW30/31 固态软启动器适用于三相异步机器的软启动和止动。
由于两相控制,在整个启动时间内,电流在各个相位始终保持值。 由于连续电压影响,在星形-三角形启动器条件下无可避免的现象,如电流和转矩峰值,在这种情况下不会发生。
应用领域
风扇
泵
成型/施工机械
压力机
自动扶梯
运输系统
空调系统
通风机
装配线
压缩机和冷却机
操作机构
配置
3RW 固态电机控制器设计用于简便启动条件中。 JLoad < 10 x JMotor. 在异常条件或增大开关频率的情况下,可能有必要选择一个较大的设备。 要获尺寸,使用 Win-Soft Starter 选型和模拟程序。
如果起动时间较长,必要时必须选用用于较重起动负载的过载继电器。 推荐使用 PTC 传感器 这同样适用于平稳斜降,因为在斜降时间内,可以适用一个附件电流负荷,和自由斜降做对比。
不允许在电机馈电线内 SIRIUS 3RW 软启动器和电机之间使用电容性元件(如,不能使用无功补偿设备)。 此外,无论是用于无功补偿的静态系统,还是动态 PFC(功率因数校正),在启动时和软启动器斜降时都不能并行操作。 这对于防止补偿设备和/或软启动器发生故障来说十分重要。
主电路的所有元件(比如熔断器,开关设备和过载继电器)应该按照在加载短路时直接起动的情况下相应的进行选型。 熔断器,开关设备和过载继电器必须单独订购。 请遵守在技术数据中的开关频率