
扫一扫,微信关注我们


| 品牌 | Siemens/西门子 | 应用领域 | 化工,电子 |
|---|---|---|---|
| 产地 | 德国 | 品牌 | 西门子 |
西门子S7-200SMART主机模块CPUST40
硬件设备及其安装
下面用一个实例来介绍Smart Line触摸屏与一台V20变频器通过MODBUS通讯的实现方法。该例子中用到的主要硬件设备如表1所示,触摸屏组态软件为WinCC Flexible 2008 SP4 China。
表1 示例主要硬件设备
| 名称 | 订货号 | 数量 | 说明 |
| 触摸屏 | 6AV6648-0BE11-3AX0 | 1 | Smart 1000 IE |
| 24V电源 | 6EP1332-1SH51 | 1 | DC24V/4A |
| 变频器 | 6SL3210-5BE17-5UV0 | 1 | V20 变频器 0.75kW |
| 电机 | 1LA9060-4KA10-Z | 1 | 1LA9 电机 0.12kW |
硬件安装步骤如下:
1)将变频器、电机、触摸屏固定在安装工位上。
2)连接变频器到电机的动力电缆和接地电缆。
3)连接供电电源到变频器的动力电缆和接地电缆。
4)连接变频器和触摸屏的RS485通讯电缆。触摸屏RS485的9针接口与 V20端子对应关系:3对应P+,8对应N-。
5)连接24V直流电源的交流进线电缆和到触摸屏的直流供电电缆。
3. V20变频器参数设置
V20变频器要采用MODBUS通讯,可以做如下设置:
1)变频器恢复出厂参数:
P0010=30
P0970=21
2)变频器快速调试,选择Cn011-MODBUS通讯连接宏:
a)设置电网频率和功率单位
b)输入电机铭牌参数
c)选择连接宏Cn011-MODBUS通讯
d)选择应用宏AP000
Cn011连接宏对应参数如表2所示。
表2 Cn011对应参数设置
| 参数 | 描述 | 工厂缺省值 | Cn011默认值 | 备注 |
| P0700[0] | 选择命令源 | 1 | 5 | RS485为命令源 |
| P1000[0] | 选择速度给定 | 1 | 5 | RS485为速度设定值 |
| P2023[0] | RS485协议选择 | 1 | 2 | MODBUS RTU协议 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率为9600bps |
| P2021[0] | MODBUS地址 | 1 | 1 | 变频器MODBUS地址为1 |
| P2022[0] | MODBUS应答超时时间 | 1000 | 1000 | 向主站发回应答的大时间 |
| P2014[0] | USS/MODBUS报文间断时间 | 2000 | 100 | 监控报文间断时间 |
3)修改MODBUS通讯参数,其它参数为Cn011连接宏默认参数:
P2014[0]=0 不监控报文间隔时间,否则可能会报F72故障
P2021[0]=3 MODBUS设备地址为3(与触摸屏组态软件中设置的从站地址一致)
4. 触摸屏组态
在WinCC Flexible 2008 SP4 China软件中组态Smart 1000 IE触摸屏。详细步骤如下:
1)创建项目。
创建一个空项目,如图3所示。

图3 创建空项目
选择触摸屏设备为Smart 1000 IE,如图4所示。

图4 选择Smart 1000 IE触摸屏
2)设置连接。
在连接画面中新建一个连接,相关参数设置如下:
通讯驱动程序:Modicon MODBUS
类型:RS485
波特率:9600
奇偶校验:偶
数据位:8
停止位:1
组帧:RTU Standard
CPU类型:984
从站地址:3
连接设置如图5所示。

图5 连接设置西门子S7-200SMART主机模块CPUST40
3)添加变量。
添加与变频器监控相关的10个变量,如表3所示。
表3 变量列表
| 变量名 | MODBUS寄存器地址 | 说明 |
| CtrlWord1 | 40100 | 控制字1 |
| SetPoint | 40101 | 速度设定值 |
| StsWord1 | 40110 | 状态字1 |
| Feedback | 40111 | 速度实际值 |
| ActFreq | 40342 | 频率实际值 |
| OutpVoltage | 40343 | 输出电压 |
| DCVol | 40344 | 直流电压 |
| OutpCurrent | 40345 | 输出电流 |
| OutpTorque | 40346 | 输出转矩 |
| OutpPower | 40347 | 输出功率 |
变量地址参照V20变频器操作手册,添加完成后的变量画面如图6所示。
图6 添加变量
速度设定值变量SetPoint是由-16384(-4000H)到+16384(+4000H)来表示-50Hz到+50Hz的转速,此处采用变量的线性转换属性,将-16384对应-1500,+16384对应+1500,如图7所示。再采用变量的限制值属性,将变量的输入值限制在-1600和+1600之间,如果超出该限制值的范围,则输入不起作用。如图8所示。
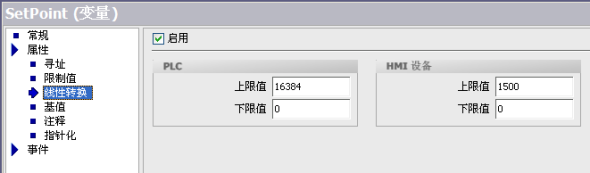
图7 速度设定值变量线性转换

图8 速度设定值变量限制值
速度反馈值变量Feedback也是由-16384(-4000H)到+16384(+4000H)来表示-50Hz到+50Hz的转速,此处也采用变量的线性转换属性,将-16384对应-1500,+16384对应+1500,如图9所示。注意,图9和图7所示的线性转换是一致的。

图9 速度反馈值变量线性转换
4)添加画面。
项目生成时已经有一个模板和一个画面,此例仅用到一个画面。修改画面的名字为V20_Monitor,如图10所示。

图10 编辑之前的画面V20_Monitor
5)编辑模板。
模板中的对象在选择使用模板的画面中会显示出来,此处把西门子的LOGO和退出Runtime的按钮放置在模板中,如图11所示。

图11 编辑模板
然后在按钮的事件属性中添加函数。在按钮STOP RT事件属性的单击事件下添加StopRuntime函数,如图12所示。

图12 退出运行画面按钮事件设置
6)编辑画面。
在V20_Monitor画面中放置IO域、文本域、按钮、棒图、圆形等对象。在文本域中输入相应的文本,设置字号、颜色等,将相关对象分类排列整齐,完成后的V20_Monitor画面如图13所示。

图13编辑完成的画面V20_Monitor
给10个IO域分别连接10个变量。
其中控制字1和状态字1采用16进制显示,控制字1类型模式为输入/输出,状态字1类型模式为输出,如图14所示。
